- 1University of Illinois at Urbana-Champaign
- 2Massachusetts Institute of Technology
Abstract
Our world is full of identical objects (e.g., cans of coke, cars of same model).
These duplicates, when seen together, provide additional and strong cues for us to effectively reason about 3D.
Inspired by this observation, we introduce Structure from Duplicates (SfD), a novel inverse graphics framework that reconstructs geometry,
material, and illumination from a single image containing multiple identical objects.
SfD begins by identifying multiple instances of an object within an image,
and then jointly estimates the 6DoF pose for all instances.An inverse graphics pipeline is subsequently employed to jointly reason about the shape,
material of the object, and the environment light, while adhering to the shared geometry and material constraint across instances.
Our primary contributions involve utilizing object duplicates as a robust prior for single-image inverse graphics
and proposing an in-plane rotation-robust Structure from Motion (SfM) formulation for joint 6-DoF object pose estimation.
By leveraging multi-view cues from a single image, SfD generates more realistic and detailed 3D reconstructions,
significantly outperforming existing single image reconstruction models and
multi-view reconstruction approaches with a similar or greater number of observations.
Poster
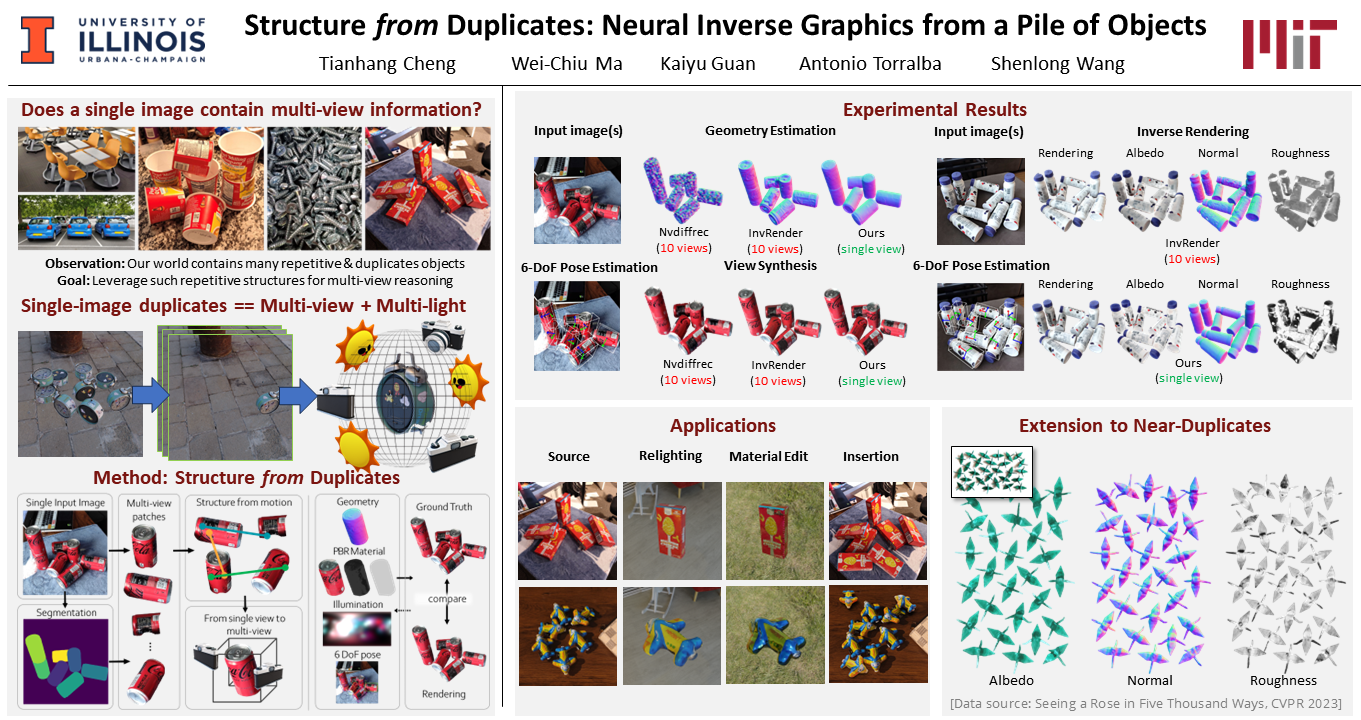
Method overview: (Left) SfD begins by identifying multiple instances of an object
within an image, and then jointly estimates the 6DoF pose for all instances. (Right) An inverse
graphics pipeline is subsequently employed to reason about the shape, material of the object, and the
environment light, while adhering to the shared geometry and material constraint across instances
Video (with voice)
BibTeX
@inproceedings{cheng2023structure,
title={Structure from Duplicates: Neural Inverse Graphics from a Pile of Objects},
author={Cheng, Tianhang and Ma, Wei-Chiu and Guan, Kaiyu and Torralba, Antonio and Wang, Shenlong},
booktitle={Thirty-seventh Conference on Neural Information Processing Systems},
year={2023}
}